- 傳智能駕駛計算系統(tǒng)
- 基于穩(wěn)定可靠的硬件平臺��、基礎(chǔ)軟件��、軟件中間件和自研算法能力,聯(lián)合算法與芯片生態(tài)伙伴�,以行業(yè)領(lǐng)先的產(chǎn)品開發(fā)與迭代速度和靈活的商業(yè)模式,為整車廠提供入門到高性能的智能駕駛域控制器解決方案����。
- 智能駕駛傳感器
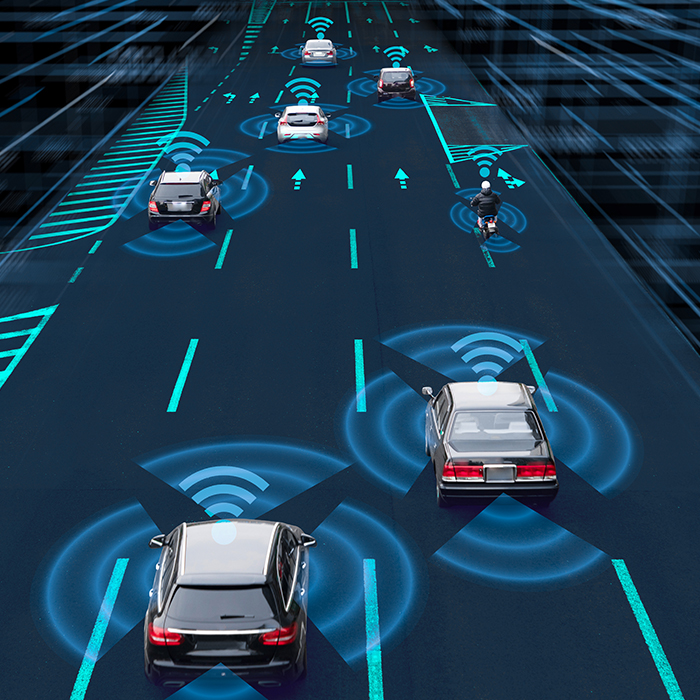
- 德賽西威通過攝像頭、毫米波���、超聲波����、激光雷達、智能天線等多種傳感器深度融合���,為艙內(nèi)/艙外不同應(yīng)用場景提供多種靈活組合的一體化解決方案�����。同時���,利用V2X技術(shù)實現(xiàn)車與人、車與基礎(chǔ)設(shè)施��、車與車和車與后臺的實時連接與通訊����,實現(xiàn)超視距的感知能力,提供如實時交通路況��、道路信息���、行人信息等用于車輛綜合決策與控制及車聯(lián)網(wǎng)服務(wù)����。
- 智慧交通系統(tǒng)
- 聚焦研發(fā)與制造�,基于交通載具���、路側(cè)多種智能終端組合的方式�,為城市交管、高速公路���、交運物流�����、軌道交通����、交通補能等場景提供“促進綠色低碳發(fā)展��、提升交通安全���、優(yōu)化通行效率’的智慧交通產(chǎn)品和解決方案�。










 粵公網(wǎng)安備:44130202000627號
粵公網(wǎng)安備:44130202000627號